Autonomous Ground Robot
Published:
This group project was completed as part of the EG1311 Design and Make course taught at the National University of Singapore (NUS). For more information and details, view the full report here
Introduction
The EG1311 “Design and Make” module serves as a foundational component of the Common Curriculum for the National University of Singapore (NUS) College of Design and Engineering. The course adopts a “Learning by Doing” framework, shifting away from traditional theory-heavy lectures toward a project-based learning (PBL) environment.
Technical scope
The curriculum is designed to bridge the gap between digital design and physical realization. We were required to demonstrate proficiency in three primary technical domains:
Computer-Aided Design (CAD): Advanced use of Autodesk Fusion 360 for 3D modeling, ensuring designs are compatible with rapid prototyping tools.
Electronics and Embedded Systems: Implementation of Arduino (C++ based) microcontrollers to interface with various actuators and sensors (ultrasonic, infrared, etc.).
Fabrication: Hands-on application of mechanical assembly, utilizing laser cutting and basic workshop tools.
Requirements
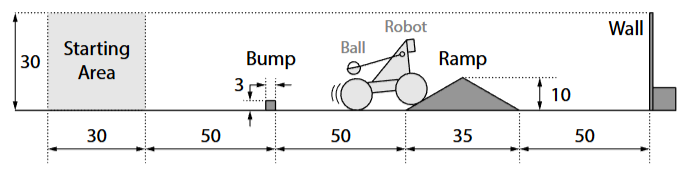
The centerpiece of the module is the group design project. Students must design, build, and program a small-scale vehicle capable of navigating a standardized obstacle course.
Standard Performance Metrics:
Inclination Handling: The vehicle must ascend and descend a steep ramp without mechanical failure.
Obstacle Negotiation: Successful traversal over physical bumps or through narrow pathways.
Precision Maneuvering: Execution of specific terminal tasks, such as stopping within a defined zone or discharging a payload.